Python實(shí)現(xiàn)CAN報(bào)文轉(zhuǎn)換工具教程
一、CAN報(bào)文簡介
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)的,并最終成為國際標(biāo)準(zhǔn)(ISO 11898),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。
CAN總線以報(bào)文為單位進(jìn)行數(shù)據(jù)傳送。CAN報(bào)文按照幀格式可分為標(biāo)準(zhǔn)幀和擴(kuò)展幀,標(biāo)準(zhǔn)幀是具有11位標(biāo)識符的CAN幀,擴(kuò)展幀是具有29位標(biāo)識符的CAN幀。按照幀類型可分為:1.從發(fā)送節(jié)點(diǎn)向其它節(jié)點(diǎn)發(fā)送數(shù)據(jù);2.遠(yuǎn)程幀:向其它節(jié)點(diǎn)請求發(fā)送具有同一識別符的數(shù)據(jù)幀;3.錯誤幀:指明已檢測到總線錯誤;4.過載幀:過載幀用以在數(shù)據(jù)幀(或遠(yuǎn)程幀)之間提供一附加的延時。共有兩種編碼格式:Intel格式和Motorola格式,在編碼優(yōu)缺點(diǎn)上,Motorola格式與Intel格式并沒有孰優(yōu)孰劣之分,只不過根據(jù)設(shè)計(jì)者的習(xí)慣,由用戶自主選擇罷了。當(dāng)然,對于使用者來講,在進(jìn)行解析之前,就必須要知道編碼的格式是哪一種,否則,就不能保證正確地解析信號的含義。以下就以8位字節(jié)編碼方式的CAN總線信號為例,詳細(xì)分析一下兩者之間的區(qū)別。
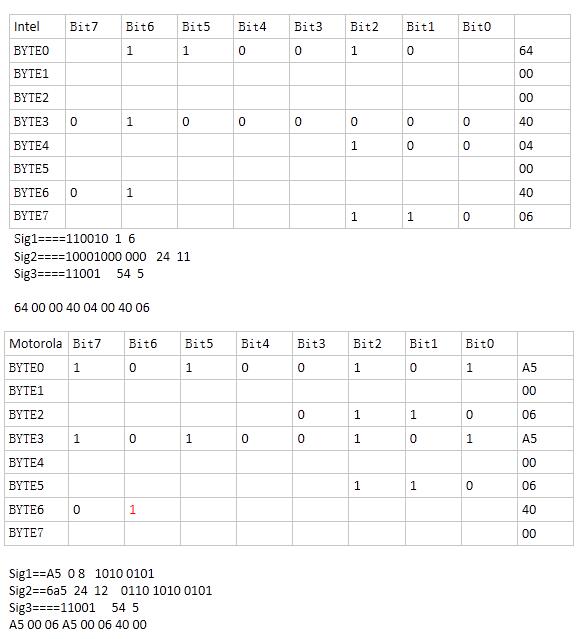
Intel編碼格式
當(dāng)一個信號的數(shù)據(jù)長度不超過1個字節(jié)(8位)并且信號在一個字節(jié)內(nèi)實(shí)現(xiàn)(即該信號沒有跨字節(jié)實(shí)現(xiàn)):該信號的高位(S_msb)將被放在該字節(jié)的高位,信號的低位(S_lsb)將被放在該字節(jié)的低位。
當(dāng)一個信號的數(shù)據(jù)長度超過1個字節(jié)(8位)或者數(shù)據(jù)長度不超過一個字節(jié)但是采用跨字節(jié)方式實(shí)現(xiàn)時:該信號的高位(S_msb)將被放在高字節(jié)(MSB)的高位,信號的低位(S_lsb)將被放在低字節(jié)(LSB)的低位。
Motorola編碼格式
當(dāng)一個信號的數(shù)據(jù)長度不超過1個字節(jié)(8位)并且信號在一個字節(jié)內(nèi)實(shí)現(xiàn)(即該信號沒有跨字節(jié)實(shí)現(xiàn)):該信號的高位(S_msb)將被放在該字節(jié)的高位,信號的低位(S_lsb)將被放在該字節(jié)的低位。
當(dāng)一個信號的數(shù)據(jù)長度超過1個字節(jié)(8位)或者數(shù)據(jù)長度不超過一個字節(jié)但是采用跨字節(jié)方式實(shí)現(xiàn)時:該信號的高位(S_msb)將被放在低字節(jié)(MSB)的高位,信號的低位(S_lsb)將被放在高字節(jié)(LSB)的低位。
可以看出,當(dāng)一個信號的數(shù)據(jù)長度不超過1Byte時,Intel與Motorola兩種格式的編碼結(jié)果沒有什么不同,完全一樣。當(dāng)信號的數(shù)據(jù)長度超過1Byte時,兩者的編碼結(jié)果出現(xiàn)了明顯的不同。
二、CAN報(bào)文轉(zhuǎn)換工具需求分析
1、 支持標(biāo)準(zhǔn)幀的CAN報(bào)文的轉(zhuǎn)換,擴(kuò)展幀暫不支持
2、 CAN報(bào)文支持Intel、motorola兩種編碼,先支持motorola格式,后期追加Intel格式
3、 工具具有一定的容錯處理能力、報(bào)告生成能力
4、 制定統(tǒng)一格式,方便使用者修改測試腳本
5、增加交互模式,鍵盤輸入,控制臺輸出;例如:
提示語:startBit:length:minValue:maxValue:setValue
輸入:35:1:0:1:1
或:35:1:::1
控制臺輸出:00 00 00 00 08 00 00 00
Intel和Motorola編碼舉例:
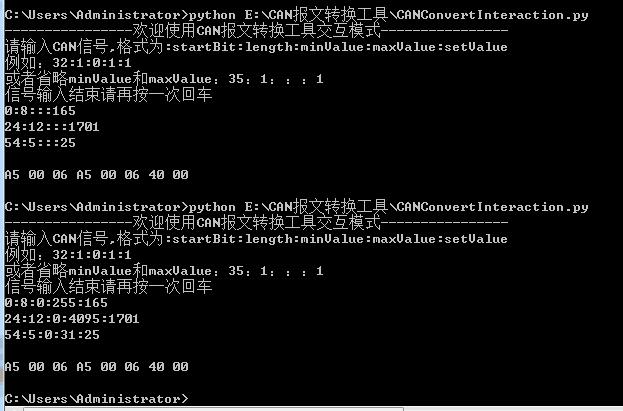
三、交互模式
代碼如下:
import sysprint('----------------歡迎使用CAN報(bào)文轉(zhuǎn)換工具交互模式----------------')print('請輸入CAN信號,格式為:startBit:length:minValue:maxValue:setValue')print('例如:32:1:0:1:1')print('或者省略minValue和maxValue:35:1:::1')print('信號輸入結(jié)束請?jiān)侔匆淮位剀?) #十進(jìn)制轉(zhuǎn)換成二進(jìn)制listdef octToBin(octNum, bit): while(octNum != 0): bit.append(octNum%2) octNum = int(octNum/2) for i in range(64-len(bit)): bit.append(0) sig = []startBit = []length = []setValue = []#輸入CAN信號while True: input_str = input() if not len(input_str): break if(input_str.count(':')<4): print('輸入格式錯誤,參數(shù)缺少setValue,請重新輸入!') continue if(input_str.split(':')[4]==''): print('setValue參數(shù)不能為空,請重新輸入!') continue sig.append(input_str)#解析CAN信號for i in range(len(sig)): startBit.append(int(sig[i].split(':')[0])) length.append(int(sig[i].split(':')[1])) setValue.append(int(sig[i].split(':')[4]))#CAN數(shù)組存放CAN報(bào)文值 CAN = []for i in range(64): CAN.append(-1)for i in range(len(startBit)): #長度超過1Byte的情況,暫不支持 if(length[i]>16): print('CAN信號長度超過2Byte,暫不支持!!!') sys.stdin.readline() sys.exit() #長度未超過1Byte的情況且未跨字節(jié)的信號 if((startBit[i]%8 + length[i])<=8): for j in range(length[i]): bit = [] #setValue的二進(jìn)制值按字節(jié)位從低到高填 octToBin(setValue[i],bit) #填滿字節(jié)長度值 if(CAN[startBit[i]+j]==-1): CAN[startBit[i]+j] = bit[j] #字節(jié)存在沖突 else: print(sig[i] + '字節(jié)位存在沖突,生成CAN報(bào)文失敗!!!') sys.stdin.readline() sys.exit() #跨字節(jié)的信號 else: #高位位數(shù)和低位位數(shù) highLen = 8 - startBit[i]%8 lowLen = length[i] - highLen bit = [] #setValue的二進(jìn)制值按字節(jié)位從低到高填 octToBin(setValue[i],bit) #先填進(jìn)信號的高位 for j1 in range(highLen): if(CAN[startBit[i]+j1]==-1): CAN[startBit[i]+j1] = bit[j1] #字節(jié)存在沖突 else: print(sig[i] + '字節(jié)位存在沖突,生成CAN報(bào)文失敗!!!') sys.stdin.readline() sys.exit() #再填進(jìn)信號的低位 for j2 in range(lowLen): if(CAN[(int(startBit[i]/8)-1)*8+j2]==-1): CAN[(int(startBit[i]/8)-1)*8+j2] = bit[highLen+j2] #字節(jié)存在沖突 else: print(sig[i] + '字節(jié)位存在沖突,生成CAN報(bào)文失敗!!!') sys.stdin.readline() sys.exit()#剩余位默認(rèn)值設(shè)為0for i in range(64): if(CAN[i]==-1): CAN[i] = 0#----------------將二進(jìn)制list每隔8位轉(zhuǎn)換成十六進(jìn)制輸出----------------#其中,map()將list中的數(shù)字轉(zhuǎn)成字符串,按照Motorola格式每隔8位采用了逆序# ’’.join()將二進(jìn)制list轉(zhuǎn)換成二進(jìn)制字符串,int()將二進(jìn)制字符串轉(zhuǎn)換成十進(jìn)制#hex()再將十進(jìn)制轉(zhuǎn)換成十六進(jìn)制,upper()轉(zhuǎn)換成大寫,兩個lstrip()將'0X'刪除,#zfill()填充兩位,輸出不換行,以空格分隔print(hex(int(’’.join(map(str,CAN[7::-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[15:7:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[23:15:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[31:23:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[39:31:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[47:39:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[55:47:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='')print(hex(int(’’.join(map(str,CAN[63:55:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2))
運(yùn)行截圖:
錯誤提示:

四、配置項(xiàng)模式
配置文件如下:
##注釋::start#編碼格式:0=Intel;1=MotorolaencodeType=1#幀格式:0=標(biāo)準(zhǔn)幀;1=擴(kuò)展幀;canMode=0#幀類型:0=數(shù)據(jù)幀;...canType=0#默認(rèn)初始值(0~1)defaultValue=0#MSG定義msgName=BCM_FrP01msgID=0x2CD#長度(BYTE)msgLength=8#signal定義#sigName=name:startBit:length:minValue:maxValue:setValue#sigName=ReverseSw:25:6:0:1:13#sigName=Trunk_BackDoor_Sts:33:2:0:1:2#sigName=DRVUnlockState:37:2:0:1:3#sigName=HeadLampLowBeam:40:8:0:1:60#sigName=HoodStatus:51:1:0:1:0#sigName=HeadLampHighBeam:52:1:0:1:0#sigName=RLDoorStatus:59:1:0:1:0#sigName=RRDoorStatus:58:1:0:1:0#sigName=PsgDoorStatus:57:2:0:1:0sigName=One:0:8:0:255:165sigName=Two:24:12:0:4095:1701sigName=Three:54:5:0:31:25::end::start#編碼格式:0=Intel;1=MotorolaencodeType=1#幀格式:0=標(biāo)準(zhǔn)幀;1=擴(kuò)展幀;canMode=0#幀類型:0=數(shù)據(jù)幀;...canType=0#默認(rèn)初始值(0~1)defaultValue=0#MSG定義msgName=BCM_FrPmsgID=0x2CD#長度(BYTE)msgLength=8#signal定義#sigName=name:startBit:length:minValue:maxValue:setValue#sigName=ReverseSw:25:6:0:1:13#sigName=Trunk_BackDoor_Sts:33:2:0:1:2#sigName=DRVUnlockState:37:2:0:1:3#sigName=HeadLampLowBeam:40:8:0:1:60#sigName=HoodStatus:51:1:0:1:0#sigName=HeadLampHighBeam:52:1:0:1:0#sigName=RLDoorStatus:59:1:0:1:0#sigName=RRDoorStatus:58:1:0:1:0#sigName=PsgDoorStatus:57:2:0:1:0sigName=One:35:1:0:1:1::end
代碼如下:
#!/usr/bin/pythondefaultValue = 0sigName = []startBit = []length = []minValue = []maxValue = []setValue = []#CAN數(shù)組存放CAN報(bào)文值CAN = []logFile = open('log.txt','w')def parseConfig(): config = open('Config.txt','r') count = 0 isError = False for line in config: line = line.strip() #注釋 if(line.find('#')>=0): continue #開始標(biāo)記 elif(line.find('::start')>=0): count = count + 1 isError = False if(count>1): sigName.clear() startBit.clear() length.clear() setValue.clear() continue else: continue elif(isError == True): continue #編碼格式 elif(line.find('encodeType')>=0): encodeType = line.split('=')[1] if(encodeType != '1'): isError = True print(str(count) + '. CAN報(bào)文生成失敗!!!目前僅支持Motorola編碼格式,暫不支持Intel編碼格式!') logFile.write('%d. CAN報(bào)文生成失敗!!!目前僅支持Motorola編碼格式,暫不支持Intel編碼格式!n' % count) continue #幀格式 elif(line.find('canMode')>=0): canMode = line.split('=')[1] if(canMode != '0'): isError = True print(str(count) + '. CAN報(bào)文生成失敗!!!目前僅支持標(biāo)準(zhǔn)幀,暫不支持?jǐn)U展幀!') logFile.write('%d. CAN報(bào)文生成失敗!!!目前僅支持標(biāo)準(zhǔn)幀,暫不支持?jǐn)U展幀!n' % count) continue #幀類型 elif(line.find('canType')>=0): canType = line.split('=')[1] if(canType != '0'): isError = True print(str(count) + '. CAN報(bào)文生成失敗!!!目前僅支持?jǐn)?shù)據(jù)幀,暫不支持其他幀!') logFile.write('%d. CAN報(bào)文生成失敗!!!目前僅支持?jǐn)?shù)據(jù)幀,暫不支持其他幀!n' % count) continue #默認(rèn)初始值 elif(line.find('defaultValue')>=0): global defaultValue defaultValue = int(line.split('=')[1]) #MSG名稱 elif(line.find('msgName')>=0): msgName = line.split('=')[1] #MSGID elif(line.find('msgID')>=0): msgID = line.split('=')[1] #MSG長度 elif(line.find('msgLength')>=0): msgLength = line.split('=')[1] #signal定義 elif(line.find('sigName')>=0): sigName.append(line.split(':')[0].split('=')[1]) startBit.append(int(line.split(':')[1])) length.append(int(line.split(':')[2])) #minValue.append(int(line.split(':')[3])) #maxValue.append(int(line.split(':')[4])) setValue.append(int(line.split(':')[5])) elif(line.find('::end')>=0): rV,errMsg = getCANMessage() if(rV == '-1'): isError = True print(str(count) + '. CAN報(bào)文生成失敗!!!' + errMsg) logFile.write('%d. CAN報(bào)文生成失敗!!!%sn' % (count,errMsg)) continue print(str(count) + '. CAN報(bào)文生成成功!!!') logFile.write('%d. CAN報(bào)文生成成功!!!n' % count) #----------------------------輸出標(biāo)題信息---------------------------- print('msgNamettmsgIDttmsgLenttmsgData') logFile.write('msgNamettmsgIDttmsgLenttmsgDatan') if(len(msgName)<8): print(msgName + 'tt',end='') logFile.write('%stt' % msgName) else: print(msgName + 't',end='') logFile.write('%st' % msgName) print(msgID + 'tt',end='') logFile.write('%stt' % msgID) print(msgLength + 'tt',end='') logFile.write('%stt' % msgLength) #----------------將二進(jìn)制list每隔8位轉(zhuǎn)換成十六進(jìn)制輸出---------------- #其中,map()將list中的數(shù)字轉(zhuǎn)成字符串,按照Motorola格式每隔8位采用了逆序 # ’’.join()將二進(jìn)制list轉(zhuǎn)換成二進(jìn)制字符串,int()將二進(jìn)制字符串轉(zhuǎn)換成十進(jìn)制 #hex()再將十進(jìn)制轉(zhuǎn)換成十六進(jìn)制,upper()轉(zhuǎn)換成大寫,兩個lstrip()將'0X'刪除, #zfill()填充兩位,輸出不換行,以空格分隔 print(hex(int(’’.join(map(str,CAN[7::-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[15:7:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[23:15:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[31:23:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[39:31:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[47:39:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[55:47:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2) + ' ',end='') print(hex(int(’’.join(map(str,CAN[63:55:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[7::-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[15:7:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[23:15:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[31:23:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[39:31:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[47:39:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%s ' % hex(int(’’.join(map(str,CAN[55:47:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) logFile.write('%sn' % hex(int(’’.join(map(str,CAN[63:55:-1])),2)).upper().lstrip('0').lstrip('X').zfill(2)) config.close() #十進(jìn)制轉(zhuǎn)換成二進(jìn)制list def octToBin(octNum, bit): while(octNum != 0): bit.append(octNum%2) octNum = int(octNum/2) for i in range(64-len(bit)): bit.append(0) #獲取CAN報(bào)文值def getCANMessage(): CAN.clear() for i in range(64): CAN.append(-1) for i in range(len(startBit)): #長度超過1Byte的情況,暫不支持 if(length[i]>16): errMsg = ' CAN信號長度超過2Byte,暫不支持!!!' #print(sigName[i] + errMsg) return '-1',errMsg #長度未超過1Byte的情況且未跨字節(jié)的信號 if((startBit[i]%8 + length[i])<=8): for j in range(length[i]): bit = [] #setValue的二進(jìn)制值按字節(jié)位從低到高填 octToBin(setValue[i],bit) #填滿字節(jié)長度值 if(CAN[startBit[i]+j]==-1): CAN[startBit[i]+j] = bit[j] #字節(jié)存在沖突 else: errMsg = ' 字節(jié)位存在沖突,生成CAN報(bào)文失敗!!!' #print(sigName[i] + errMsg) return '-1',errMsg #跨字節(jié)的信號 else: #高位位數(shù)和低位位數(shù) highLen = 8 - startBit[i]%8 lowLen = length[i] - highLen bit = [] #setValue的二進(jìn)制值按字節(jié)位從低到高填 octToBin(setValue[i],bit) #先填進(jìn)信號的高位 for j1 in range(highLen): if(CAN[startBit[i]+j1]==-1): CAN[startBit[i]+j1] = bit[j1] #字節(jié)存在沖突 else: errMsg = ' 字節(jié)位存在沖突,生成CAN報(bào)文失敗!!!' #print(sigName[i] + errMsg) return '-1',errMsg #再填進(jìn)信號的低位 for j2 in range(lowLen): if(CAN[(int(startBit[i]/8)-1)*8+j2]==-1): CAN[(int(startBit[i]/8)-1)*8+j2] = bit[highLen+j2] #字節(jié)存在沖突 else: errMsg = ' 字節(jié)位存在沖突,生成CAN報(bào)文失敗!!!' #print(sigName[i] + errMsg) return '-1',errMsg #剩余位設(shè)為默認(rèn)值 for i in range(64): if(CAN[i]==-1): CAN[i] = defaultValue #若無錯誤則返回正確值 return '0','success!' if __name__ == '__main__': #調(diào)用parseConfig()函數(shù)開始執(zhí)行程序 parseConfig()
運(yùn)行結(jié)果:
1. CAN報(bào)文生成成功!!!msgNamemsgIDmsgLenmsgDataBCM_FrP010x2CD8A5 00 06 A5 00 06 40 002. CAN報(bào)文生成成功!!!msgNamemsgIDmsgLenmsgDataBCM_FrP0x2CD800 00 00 00 08 00 00 00
以上這篇Python實(shí)現(xiàn)CAN報(bào)文轉(zhuǎn)換工具教程就是小編分享給大家的全部內(nèi)容了,希望能給大家一個參考,也希望大家多多支持好吧啦網(wǎng)。
相關(guān)文章:
1. springboot自動配置原理解析2. 使用Python3 poplib模塊刪除服務(wù)器多天前的郵件實(shí)現(xiàn)代碼3. Python TestSuite生成測試報(bào)告過程解析4. 在JSP中使用formatNumber控制要顯示的小數(shù)位數(shù)方法5. SpringBoot集成mqtt的多模塊項(xiàng)目配置詳解6. 深入了解JAVA 軟引用7. 解決AJAX返回狀態(tài)200沒有調(diào)用success的問題8. 簡述JAVA同步、異步、阻塞和非阻塞之間的區(qū)別9. springboot的yml配置文件通過db2的方式整合mysql的教程10. IntelliJ IDEA設(shè)置默認(rèn)瀏覽器的方法
 網(wǎng)公網(wǎng)安備
網(wǎng)公網(wǎng)安備